自動(dòng)飛行系統(tǒng)
軟件平臺(tái)

復(fù)亞無(wú)人機(jī)解決方案以大疆經(jīng)緯系列工業(yè)無(wú)人機(jī)為飛行平臺(tái),搭配自主研發(fā)的無(wú)人機(jī)自動(dòng)機(jī)場(chǎng)、無(wú)人機(jī)自動(dòng)飛行算法和機(jī)載AI控制器,形成全自動(dòng)巡檢無(wú)人機(jī)系統(tǒng)。
系統(tǒng)優(yōu)勢(shì)
全自動(dòng)無(wú)人機(jī)解決方案無(wú)需專業(yè)飛手控制,相比傳統(tǒng)人工現(xiàn)場(chǎng)控制無(wú)人機(jī)巡檢,自動(dòng)巡檢無(wú)人機(jī)系統(tǒng)具有:
作業(yè)環(huán)境——極大減輕了巡檢作業(yè)人員的勞動(dòng)強(qiáng)度和勞動(dòng)時(shí)間;
解放人力——無(wú)需專業(yè)的無(wú)人機(jī)飛行控制人員;
靈活作業(yè)——巡檢頻次可自由制定;
提高效率——作業(yè)效率和巡檢精細(xì)化程度較無(wú)人機(jī)人工巡檢提升數(shù)倍,
提升質(zhì)量——極大提高了后期數(shù)據(jù)的分析、缺陷診斷效率和質(zhì)量;
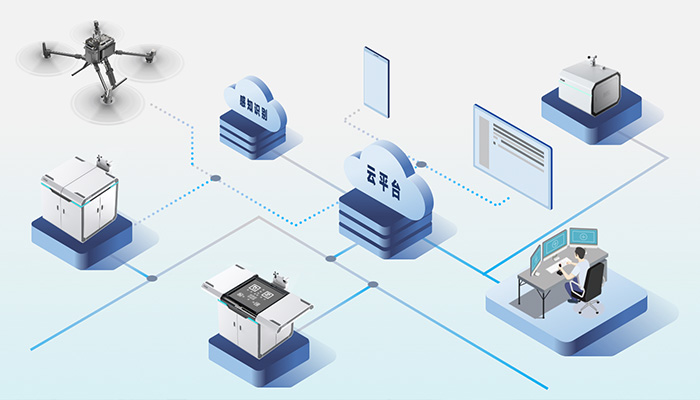
系統(tǒng)構(gòu)成
1.復(fù)亞無(wú)人機(jī)自動(dòng)機(jī)場(chǎng),無(wú)需攜帶無(wú)人機(jī)通勤至作業(yè)現(xiàn)場(chǎng),機(jī)場(chǎng)部署作業(yè)現(xiàn)場(chǎng),實(shí)現(xiàn)存放、高精度自主起降、電池更換等功能,自動(dòng)更換電池連續(xù)高頻作業(yè)(間隔不超過3分鐘)
2.自動(dòng)飛行算法,無(wú)需人工操控,無(wú)需作業(yè)經(jīng)驗(yàn),在復(fù)雜作業(yè)環(huán)境中實(shí)現(xiàn)無(wú)人機(jī)全自動(dòng)巡航、拍攝。
3.云端識(shí)別診斷,無(wú)需人工識(shí)別比對(duì),圖像實(shí)時(shí)傳輸?shù)皆贫耍?jīng)識(shí)別診斷后將數(shù)據(jù)報(bào)告給工作人員。
系統(tǒng)功能
離線規(guī)劃航跡
高精度3D點(diǎn)云離線標(biāo)注巡檢目標(biāo),系統(tǒng)自動(dòng)生成無(wú)人機(jī)航點(diǎn)動(dòng)作和飛行航跡。
自動(dòng)起降換電
自動(dòng)機(jī)場(chǎng)就近部署在作業(yè)現(xiàn)場(chǎng),自動(dòng)起飛,高精度視覺自動(dòng)降落。自動(dòng)進(jìn)行電池更換,支持高頻作業(yè),三分鐘即可再次起飛作業(yè)。
自動(dòng)AI識(shí)別、對(duì)準(zhǔn)與拍攝
通過機(jī)器視覺識(shí)別目標(biāo),通過圖像算法控制云臺(tái)鎖定巡檢目標(biāo),并始終處于畫幅中央,自動(dòng)調(diào)整焦距放大目標(biāo)區(qū)域進(jìn)行拍攝。




免費(fèi)預(yù)約演示
 全自動(dòng)飛行任務(wù)選擇與執(zhí)行
自動(dòng)機(jī)場(chǎng)的操控與監(jiān)控
自動(dòng)飛行任務(wù)下的數(shù)據(jù)采集
無(wú)人機(jī)自動(dòng)回庫(kù)后進(jìn)行充電或換電
自動(dòng)巡查任務(wù)的回放,圖像數(shù)據(jù)的查閱
全自動(dòng)飛行任務(wù)選擇與執(zhí)行
自動(dòng)機(jī)場(chǎng)的操控與監(jiān)控
自動(dòng)飛行任務(wù)下的數(shù)據(jù)采集
無(wú)人機(jī)自動(dòng)回庫(kù)后進(jìn)行充電或換電
自動(dòng)巡查任務(wù)的回放,圖像數(shù)據(jù)的查閱
添加官方客服

我們的工作時(shí)間是工作日9:00~17:30
期待與您溝通并提供您所需的支持或方案,謝謝!

 行業(yè)方案與產(chǎn)品報(bào)價(jià)
相關(guān)場(chǎng)景案例資料
復(fù)亞自動(dòng)飛行系統(tǒng)功能
靈活的商務(wù)合作模式
行業(yè)方案與產(chǎn)品報(bào)價(jià)
相關(guān)場(chǎng)景案例資料
復(fù)亞自動(dòng)飛行系統(tǒng)功能
靈活的商務(wù)合作模式
行業(yè)方案與產(chǎn)品報(bào)價(jià)
相關(guān)場(chǎng)景案例資料
復(fù)亞自動(dòng)飛行系統(tǒng)功能
靈活的商務(wù)合作模式
行業(yè)方案與產(chǎn)品報(bào)價(jià)
相關(guān)場(chǎng)景案例資料
復(fù)亞自動(dòng)飛行系統(tǒng)功能
靈活的商務(wù)合作模式

復(fù)亞智能是業(yè)內(nèi)領(lǐng)先的無(wú)人機(jī)全自動(dòng)飛行系統(tǒng)研發(fā)和服務(wù)商,用高度智能的自動(dòng)飛行系統(tǒng)滿足政企用戶低空巡查業(yè)務(wù)需求,分布式部署的無(wú)人機(jī)機(jī)場(chǎng),讓巡邏干預(yù)隨時(shí)可達(dá),巡檢數(shù)據(jù)觸手可及。
投資郵箱:invest@foiadrone.com
媒體合作:BD@foiadrone.com
微信客服
周一至周五:9:00-17:30







友情鏈接:
?2023 上海復(fù)亞智能技術(shù)發(fā)展有限公司版權(quán)所有 備案號(hào):滬ICP備2023002692號(hào)
法律聲明 | 隱私政策 | 網(wǎng)站地圖

掃碼關(guān)注