無人機目標追蹤算法能夠對識別到的目標進行實時監測和跟蹤,被廣泛應用于交通、城管、安防等場景。然而,在實際應用中目標被遮擋的情況時有發生,如車輛進過橋下或者被樹木、路牌遮擋等,可能會導致追蹤失敗。
對此,復亞智能對無人機目標追蹤自研算法進行了深度的優化升級,能有效應對復雜場景下的長時間遮擋挑戰,經過多次實際測試驗證,可實現對正確目標的持續、穩定追蹤。

無人機目標追蹤的實現是通過捕捉目標信息、提取目標特征,再對目標進行持續鎖定和追蹤,同時系統會根據目標的位置和運動狀態動態調整飛行路徑,確保持續追蹤目標。
長時間遮擋則是無人機目標追蹤中的一大挑戰。當目標被遮擋時,遮擋導致目標特征信息中斷,難以維持對目標的識別,同時目標在遮擋期間的運動軌跡難以預測,增加了追蹤的難度,而當遮擋物移開后,算法需要迅速重新識別正確的目標以恢復追蹤,則又是一大難點。

在長時間遮擋帶來的挑戰下,傳統的追蹤算法依賴于目標的連續視覺信息,難以維持追蹤的連續性和準確性。而復亞智能對無人機目標追蹤自研算法進行了深度的優化升級,確保持續追蹤正確目標。
針對當目標被遮擋時,無人機就失去了目標的完整信息這個問題,復亞采用了深度學習算法,通過大量訓練數據,讓算法能夠學習到目標的深層特征,包括形狀、顏色、紋理等關鍵信息。在遮擋物移開或目標重新出現時,算法會根據已記憶的特征,迅速重新識別并追蹤目標,確保追蹤的連續性與準確性。
面對在遮擋期間,目標的運動軌跡變得難以預測這一問題,復亞智能追蹤算法則結合了軌跡預測算法和虛擬跟蹤技術。
在遮擋期間,復亞利用先進的軌跡預測算法,結合目標的歷史運動信息,對目標的運動軌跡進行智能預測。同時在遮擋期間,復亞智能無人機管理平臺會進行虛擬跟蹤,逐幀搜索潛在目標,確保在目標重新出現時能夠減少相似目標干擾,實現重新捕獲。

通過持續優化自研的追蹤算法能力,復亞智能提高其在復雜場景下的穩定性和準確性,確保算法能夠在短時間內完成目標檢測、追蹤和遮擋后再追蹤等任務,滿足實際應用需求。
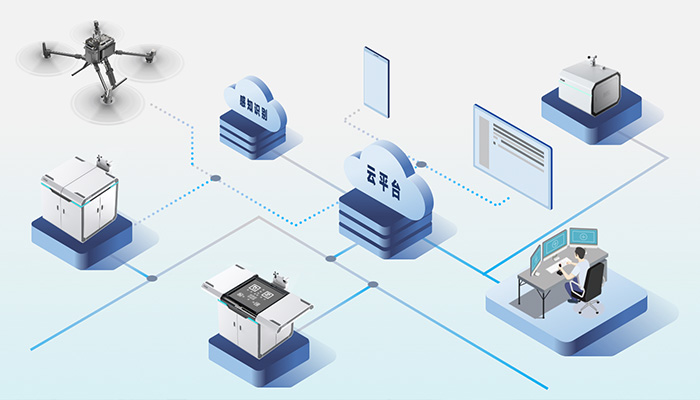
復亞智能無人機管理平臺通過實時記錄目標的位置、運動軌跡等信息,為城市管理者提供大量的實時數據支撐,助力城市管理、交通巡邏、安全監控等領域向更智能化、精準化邁進。


免費預約演示
 全自動飛行任務選擇與執行
自動機場的操控與監控
自動飛行任務下的數據采集
無人機自動回庫后進行充電或換電
自動巡查任務的回放,圖像數據的查閱
全自動飛行任務選擇與執行
自動機場的操控與監控
自動飛行任務下的數據采集
無人機自動回庫后進行充電或換電
自動巡查任務的回放,圖像數據的查閱
添加官方客服

我們的工作時間是工作日9:00~17:30
期待與您溝通并提供您所需的支持或方案,謝謝!

 行業方案與產品報價
相關場景案例資料
復亞自動飛行系統功能
靈活的商務合作模式
行業方案與產品報價
相關場景案例資料
復亞自動飛行系統功能
靈活的商務合作模式
行業方案與產品報價
相關場景案例資料
復亞自動飛行系統功能
靈活的商務合作模式
行業方案與產品報價
相關場景案例資料
復亞自動飛行系統功能
靈活的商務合作模式

復亞智能是業內領先的無人機全自動飛行系統研發和服務商,用高度智能的自動飛行系統滿足政企用戶低空巡查業務需求,分布式部署的無人機機場,讓巡邏干預隨時可達,巡檢數據觸手可及。
投資郵箱:invest@foiadrone.com
媒體合作:BD@foiadrone.com
微信客服
周一至周五:9:00-17:30

掃碼關注