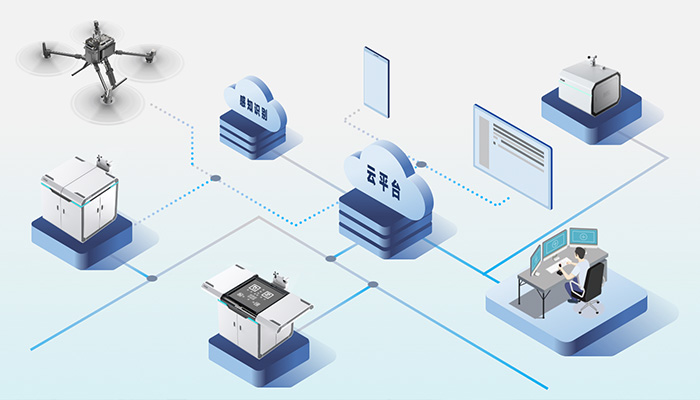
自動(dòng)飛行系統(tǒng)
軟件平臺(tái)

要實(shí)現(xiàn)無(wú)人機(jī)的高質(zhì)量拍攝、航行穩(wěn)定等功能,導(dǎo)航、通信、避障和感知等關(guān)鍵技術(shù)的發(fā)展和應(yīng)用是不可或缺的。
一、導(dǎo)航技術(shù)
導(dǎo)航技術(shù)是無(wú)人機(jī)飛行的關(guān)鍵技術(shù)之一,它包括了無(wú)人機(jī)的定位、航向控制、路徑規(guī)劃等。無(wú)人機(jī)利用先進(jìn)的全球定位系統(tǒng)和其他傳感器,可以準(zhǔn)確獲取其當(dāng)前位置和速度,并通過(guò)導(dǎo)航算法進(jìn)行航向控制,實(shí)現(xiàn)精確的飛行定位和航跡航向規(guī)劃。
二、通信技術(shù)
通信技術(shù)在無(wú)人機(jī)的飛行過(guò)程中起到了至關(guān)重要的作用。無(wú)人機(jī)通過(guò)無(wú)線通信技術(shù)與地面控制站進(jìn)行數(shù)據(jù)傳輸和指令交互,以實(shí)現(xiàn)遠(yuǎn)程遙控和控制。通信技術(shù)包括無(wú)線通信協(xié)議、數(shù)據(jù)傳輸方式、通信頻段等,以確保無(wú)人機(jī)與地面之間能夠高效、穩(wěn)定、流暢地通信。
三、避障和感知技術(shù)
避障與感知技術(shù)可以幫助無(wú)人機(jī)準(zhǔn)確感知周圍環(huán)境,并通過(guò)算法和實(shí)時(shí)決策來(lái)避開障礙物,確保飛行的安全和可靠性。利用傳感器感知周圍環(huán)境,并通過(guò)算法和實(shí)時(shí)決策來(lái)避開障礙物的技術(shù)。具體而言,它包括傳感器技術(shù)、環(huán)境建模、避障算法和實(shí)時(shí)決策與調(diào)整等方面。
四、動(dòng)力與能源技術(shù)
無(wú)人機(jī)的動(dòng)力和能源技術(shù)是其飛行的基石。無(wú)人機(jī)動(dòng)力來(lái)源通常是通過(guò)發(fā)動(dòng)機(jī)或電池提供的電能。在無(wú)人機(jī)設(shè)計(jì)中,需要充分考慮動(dòng)力系統(tǒng)的性能和重量,以確保無(wú)人機(jī)的飛行時(shí)間和負(fù)載能力。此外,高效的能源管理系統(tǒng)也是無(wú)人機(jī)關(guān)鍵技術(shù)之一,以提高無(wú)人機(jī)的續(xù)航能力。




免費(fèi)預(yù)約演示
 全自動(dòng)飛行任務(wù)選擇與執(zhí)行
自動(dòng)機(jī)場(chǎng)的操控與監(jiān)控
自動(dòng)飛行任務(wù)下的數(shù)據(jù)采集
無(wú)人機(jī)自動(dòng)回庫(kù)后進(jìn)行充電或換電
自動(dòng)巡查任務(wù)的回放,圖像數(shù)據(jù)的查閱
全自動(dòng)飛行任務(wù)選擇與執(zhí)行
自動(dòng)機(jī)場(chǎng)的操控與監(jiān)控
自動(dòng)飛行任務(wù)下的數(shù)據(jù)采集
無(wú)人機(jī)自動(dòng)回庫(kù)后進(jìn)行充電或換電
自動(dòng)巡查任務(wù)的回放,圖像數(shù)據(jù)的查閱
添加官方客服

我們的工作時(shí)間是工作日9:00~17:30
期待與您溝通并提供您所需的支持或方案,謝謝!

 行業(yè)方案與產(chǎn)品報(bào)價(jià)
相關(guān)場(chǎng)景案例資料
復(fù)亞自動(dòng)飛行系統(tǒng)功能
靈活的商務(wù)合作模式
行業(yè)方案與產(chǎn)品報(bào)價(jià)
相關(guān)場(chǎng)景案例資料
復(fù)亞自動(dòng)飛行系統(tǒng)功能
靈活的商務(wù)合作模式
行業(yè)方案與產(chǎn)品報(bào)價(jià)
相關(guān)場(chǎng)景案例資料
復(fù)亞自動(dòng)飛行系統(tǒng)功能
靈活的商務(wù)合作模式
行業(yè)方案與產(chǎn)品報(bào)價(jià)
相關(guān)場(chǎng)景案例資料
復(fù)亞自動(dòng)飛行系統(tǒng)功能
靈活的商務(wù)合作模式

復(fù)亞智能是業(yè)內(nèi)領(lǐng)先的無(wú)人機(jī)全自動(dòng)飛行系統(tǒng)研發(fā)和服務(wù)商,用高度智能的自動(dòng)飛行系統(tǒng)滿足政企用戶低空巡查業(yè)務(wù)需求,分布式部署的無(wú)人機(jī)機(jī)場(chǎng),讓巡邏干預(yù)隨時(shí)可達(dá),巡檢數(shù)據(jù)觸手可及。
投資郵箱:invest@foiadrone.com
媒體合作:BD@foiadrone.com
微信客服
周一至周五:9:00-17:30







友情鏈接:
?2023 上海復(fù)亞智能技術(shù)發(fā)展有限公司版權(quán)所有 備案號(hào):滬ICP備2023002692號(hào)
法律聲明 | 隱私政策 | 網(wǎng)站地圖

掃碼關(guān)注