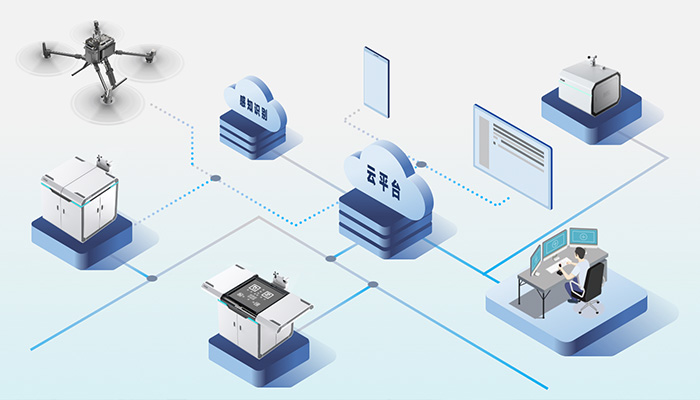










復(fù)亞電力無人機,搭配無人機全自動機場、無人機飛行大腦(圖像與飛行算法)、自主研發(fā)的智能任務(wù)管控控制平臺、分析識別平臺等,形成復(fù)亞智能電力無人機全自動巡檢系統(tǒng)。
該系統(tǒng)能及時發(fā)現(xiàn)地面人員視角難以發(fā)現(xiàn)的設(shè)備缺陷,提高巡檢效率,通過高清影像數(shù)據(jù)采集,結(jié)合智能數(shù)據(jù)分析,為運維人員提供準確的線路狀況評估結(jié)果,實現(xiàn)故障預(yù)警和預(yù)防性維護。
系統(tǒng)優(yōu)勢
電力全自動巡檢無人機系統(tǒng)無需專業(yè)飛手控制,相比傳統(tǒng)人工現(xiàn)場控制無人機巡檢,自動電力無人機巡檢系統(tǒng)具有:
作業(yè)環(huán)境——極大減輕了巡檢作業(yè)人員的勞動強度和勞動時間;
解放人力——無需專業(yè)的無人機飛行控制人員;無需輸電線路無人機巡檢作業(yè)經(jīng)驗,系統(tǒng)可自主開展輸電線路巡檢作業(yè);
靈活作業(yè)——巡檢頻次可自由制定;
提高效率——作業(yè)效率和巡檢精細化程度較無人機人工巡檢提升至少三倍;
提升質(zhì)量——極大提高了后期數(shù)據(jù)的分析、缺陷診斷效率和質(zhì)量。
系統(tǒng)價值
電力無人機自動飛行系統(tǒng)與AI識別技術(shù)融合,實現(xiàn)輸電線路的桿塔精細化巡檢、通道常態(tài)化巡視,并自動識別設(shè)備缺陷、通道隱患等異常事件。
航線生成策略。基于激光點云數(shù)據(jù)進行航線規(guī)劃,航點位置更精確。單個桿塔設(shè)置航線后,可在同類桿塔上進行套用,節(jié)省航線規(guī)劃時間。
巡檢安全高效。飛行算法保障無人機在作業(yè)過程中的飛行安全,可多角度對目標物進行精準拍攝取證。
智能缺陷識別。對桿塔的絕緣子、防震錘、螺栓等重要組件進行缺陷檢測,對通道樹障、弧垂、大型施工機械等異常事件進行識別。
數(shù)據(jù)在線流轉(zhuǎn)。在無人機管理平臺,運維人員可對巡查發(fā)現(xiàn)的輸電線路故障事件建立工單,并同步至PMS系統(tǒng),實現(xiàn)平臺間數(shù)據(jù)流轉(zhuǎn)。
系統(tǒng)構(gòu)成
復(fù)亞無人機自動機場,無需攜帶無人機通勤至作業(yè)現(xiàn)場,機場部署作業(yè)現(xiàn)場,實現(xiàn)存放、高精度自主起降、電池自動充電換電等功能。
電力自動飛行算法,無需人工操控,無需作業(yè)經(jīng)驗,在復(fù)雜作業(yè)環(huán)境中實現(xiàn)無人機全自動巡航、拍攝。
云端識別診斷,無需人工識別比對,圖像實時傳輸?shù)皆贫耍?jīng)識別診斷后將數(shù)據(jù)報告給工作人員。
智能任務(wù)管控控制平臺,多機場、多無人機的實時監(jiān)控和遠程控制,可實現(xiàn)無人機航線創(chuàng)建、任務(wù)管理、實時顯示、遠程遙控、飛行記錄、數(shù)據(jù)管理、設(shè)備臺賬管理、組織管理等功能。
系統(tǒng)功能
自動生成航線
復(fù)亞無人機電力巡檢對輸電線路進行三維激光點云數(shù)據(jù)采集、處理,構(gòu)建輸電線路精細化三維點云模型。基于激光點云模型,選定單桿塔巡檢目標物,平臺自動生成立體巡檢航線,可快速復(fù)用到同類桿塔,設(shè)定計劃即可24h自動巡查。
自動起降換電
自動機場就近部署在作業(yè)現(xiàn)場,自動起飛,高精度視覺自動降落。自動進行電池更換,支持高頻作業(yè),三分鐘即可再次起飛作業(yè)。
自動AI識別、對準與拍攝
通過機器視覺識別目標,如絕緣子、桿塔頂部等等。通過圖像算法控制云臺鎖定巡檢目標,并始終處于畫幅中央,自動調(diào)整焦距放大目標區(qū)域進行拍攝。
自動缺陷識別
智能缺陷識別算法對數(shù)據(jù)進行分析研判,輸出缺陷報告。問題工單與PMS系統(tǒng)對接,便捷安排后續(xù)整改流程。